遅ればせながら、製作した「小さい赤道儀」のST4をONにして、Autoguide を動かしてみた。
この赤道儀は、もともと短い焦点距離のカメラを乗せて、短い時間の露出で機動的に観測することを想定して作ったものであるので、長時間のガイドは不要と考えていた。なので、最初に作ったものは、ST4の端子を取り出していない。2台目は、このようにコネクタ端子を用意した。が、CONFIG 設定により、#define ST4_OFF として機能をOFFにしていた。

ArduinoMEGAとボードのピンアサイン確認して、Pins.H で割付を行い、前述のST4をONにして再コンパイルを行い、書き込む。ST4端子に何も接続せずに動作させてみると、赤道儀は恒星時運転をせずにかってに動き出す。PINの割付が悪いのかと思い、別のところにしても状況は変わらない。明らかに、ST4 PINに入力されているという状況。ソースコードをみると、ST4入力端子はソフトで Pullup 設定することになっているが、ArduinoMEGAではされないようだ。そのため、入力が不安定になり、勝手な動きをするようになったようだ。
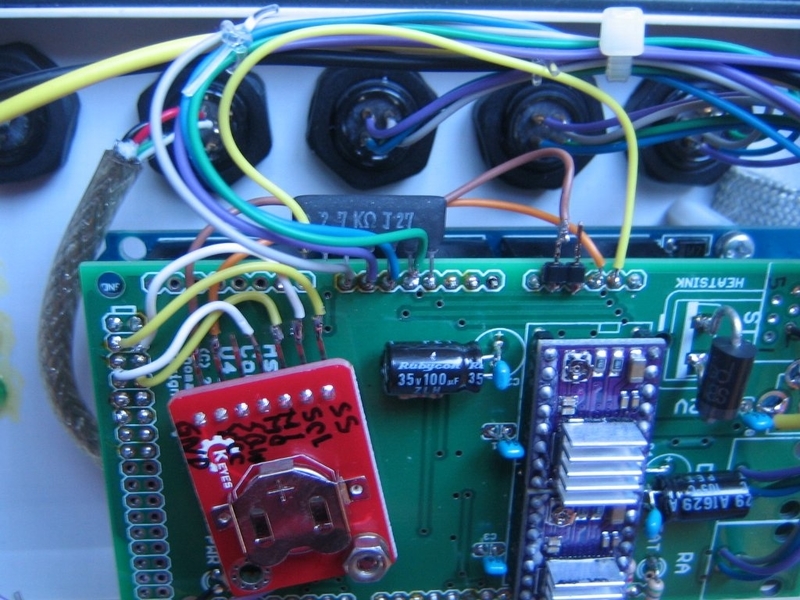
なので、写真のように、該当PINに抵抗をつけてハードでPullupした。これで、勝手に動き出すことは無くなった。
実際にフィールドで Starlight Xpress のLodeStar カメラを接続してPHDGuing でキャリブレーションを実行してみると、赤道儀が動きません、ということでエラーになる。実際画像を見ていても、全く動かない。
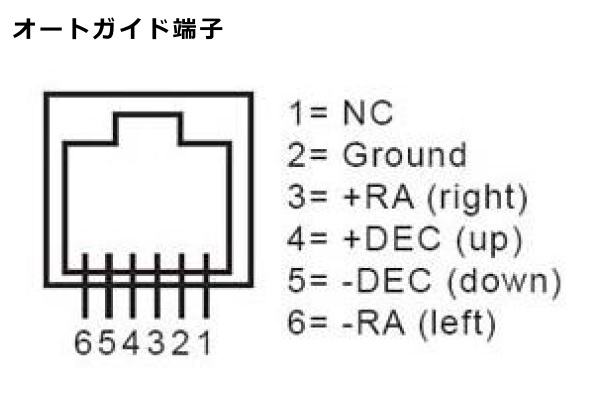
原因は、オートガイド端子の配線ミス。一般的にST4端子は、モジュラジャックを正面から見た図としてある。
こんどこそと PHDGuing でキャリブレーションを実行すると、最初のステップで望遠鏡はいきなり大きく動き、枠からはずれ、星を見失ってしまう。

原因がわからず、あれこれ操作してみてやっとわかった。
LX200のMOTORのスピードは、1.GUIDE、2.CNTR、3.FIND、4.SLEWとなっている。ST4ガイド入力がONになったときに赤道儀は、現在のスピード設定がどれであっても「GUIDE」にチェンジし、以降そのスピードで動く。
しかし、OnStepでは、そのようなことはなく、ST4ガイド入力がONになったときには現在設定されたスピードで動く。

私は、図のように、シンプルなコントローラで操作することがほとんどで、ここで設定しているスピードで赤道儀は動くことになる。また、OnStep起動時のスピードの初期設定は、3.FIND のようである。
というわけで、スピードを1.GUIDEに設定して、無事キャリブレーションを終えて、オートガイドできるようになった。GOTOで望遠鏡を動かして、オートガイドをONにするときにも、スピードがGUIDEになっているか確認しないままに実行すると、星を見失ってしまうので、なかなかめんどくさい。
オリジナルのLX200のように、ST4入力があったら、強制的にスピードをGUIDEにすればよいと思うが、今のバージョンはどうなっているのだろう。